
Il Progetto Tango di Google si pone degli obiettivi molto ambiziosi da raggiungere nel corso del tempo: arrivare a realizzare dispositivi in grado di effettuare una scansione 3D dettagliata di tutto l’ambiente che ci circonda per scopi che possono andare dal campo ingegneristico e finire, perchè no, anche a quello medico; dal semplice mapping al gaming, per finire ad applicazioni professionali.
Questo progetto molto importante ha però bisogno di essere sviluppato, ed oggi ci troviamo solamente agli inizi di quello che sarà un lungo periodo di sviluppi che col tempo renderanno sempre più completo il prototipo che per ora Google ha fornito ad una stretta cerchia di ingegneri e programmatori.
Uno di questi decide però di mostrare al pubblico cos’è in grado di fare il “secondo” prototipo Tango e come funziona in generale. Abbiamo evidenziato la parola “secondo” perchè Project Tango ha anche un altro nome, cioè Peanut, che corrisponde al nome della seconda versione del prototipo. Innanzitutto egli parte da una descrizione fisica del dispositivo, che è provvisto sia di una porta USB 3.0 nella parte inferiore sia di una porta USB 2.0 sul lato sinistro:


Avevamo poi dedicato un articolo, pochi giorni fa, alla descrizione delle 4 fotocamere presenti su questo particolare smartphone, ognuna con delle particolarità ben precise. Vi consigliamo quindi di raggiungere l’articolo da questo link nel caso in cui siate interessati a saperne di più sotto questo aspetto.
Una volta apprese le caratteristiche delle 4 fotocamere del dispositivo, è quindi possibile vederle all’opera grazie alle seguenti immagini scattate proprio da ognuna di esse:

Fotocamera posteriore classica da 4 megapixel

Fotocamera anteriore classica (angolo di visuale 120 gradi)

Fotocamera Fisheye (angolo di visuale 180 gradi)
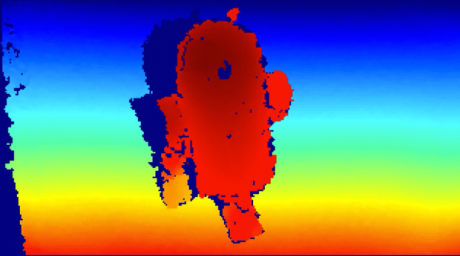
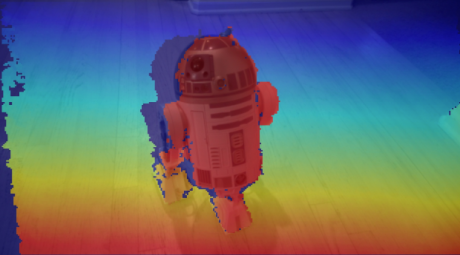
Fotocamera di profondità
Unite insieme, le 3 fotografie scattate dalle fotocamere posteriori danno come risultato un’immagine del genere:
C’è da dire che le foto vengono scattate grazie all’applicazione Fotocamera presente all’interno del sistema, che consente di scattare foto da tutte le 4 fotocamere presenti sul dispositivo. In alternativa è anche possibile avere una visualizzazione di profondità in tempo reale dalla fotocamera dedicata grazie all’applicazione Depth Viewer. Ancora dal lato sistema, il dispositivo ha un particolare tipo di accesso al Play Store, sul quale è presente una categoria ben precisa che si chiama appunto Peanut, come lo smartphone, e dalla quale si possono scaricare applicazioni in demo specificamente progettate per essere lanciate su un dispositivo del genere. Alcune di queste applicazioni sono Tango Pointcloud, Tango AR UFO e Tango Sparse Mapper, tutte sviluppate con Unity engine, ma ve ne sono anche altre sviluppate in Java come Cube Mover, Forest, Interior, Bike Exploder, PlyLoader, Tango Mapper, e Depth Scan.
A quanto pare, però, sia la fotocamera frontale che quella posteriore (parliamo di quelle classiche) sarebbero in grado di scattare foto ad infrarossi. Ecco infatti un esempio di una prima immagine scattata dalla fotocamera frontale senza infrarossi e di una seconda scattata con infrarossi:

Tutto questo incide sulla durata della batteria? Decisamente si, dato che quando si effettuano queste operazioni che richiedono particolari elaborazioni da parte della CPU, la batteria si scarica molto rapidamente. Bisogna però ricordare che questo è solamente il secondo prototipo e che quindi, sia lato software che hardware, sarà migliorato via via col tempo. La terza versione del prototipo dovrebbe poi introdurre ulteriori miglioramenti molto interessanti, ma già quello attuale è in grado di funzionare come un normale smartphone Android.
Qui di seguito potete dare un’occhiata alla scansione degli oggetti che avviene in tempo reale:
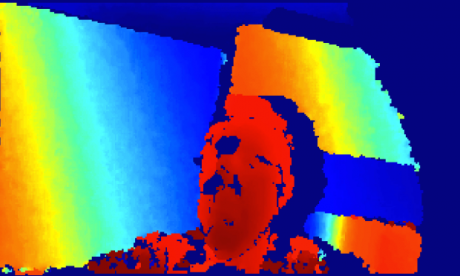
Qui invece potete osservare come Peanut effettui una scansione 3D dell’ambiente:
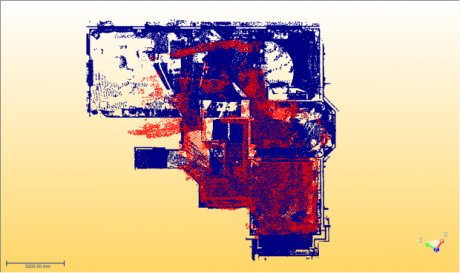
Messo a confronto con un Trimble TX8, uno scanner 3D professionale, Peanut non se la cava malissimo anche se in alcune aree non è riuscito ovviamente ad essere accurato quanto l’altro dispositivo professionale. Dalla seguente immagine è riportata in blu la scansione di un’abitazione con il Trimble TX8, mentre in rosso la scansione della stessa abitazione con Peanut (Project Tango):
Qui invece trovate il video che ne evidenzia le differenze:
Project Tango, o Peanut che dir si voglia, è ancora in una fase di sviluppo acerba ma che già inizia a dare i suoi primi timidi frutti. Tra l’altro c’è da evidenziare il fatto che Peanut è dotato anche di driver USB dedicati ad alcuni robot, come Iris della 3D Robotics e Kobuki della Yujin Robot, raffigurati nelle rispettive immagini:


Peanut è quindi in grado di comunicare con questi “droni” grazie all’USB On The Go attraverso la porta USB 3.0, che può fungere anche da ricarica. Con Project Tango sembra che Google abbia le idee chiare su come dovrà essere lo smartphone (o il tablet) del futuro: assolutamente tuttofare, nel vero senso del termine.